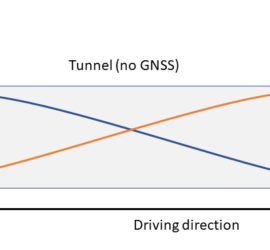
Vehicle-based Mobile Mapping is the acquisition technology of choice for fast and accurate mapping of larger areas. But how accurate is Mobile Mapping actually, and how can accuracy be improved? GNSS/INS positioning Mobile Mapping systems use […]
Mobile Mapping
8 posts
Measuring time accurately is essential for most measuring/surveying tasks, whether it is for measuring the runtime of a laser pulse for a distance measurement, or the falling time and hence speed of a mass in an […]
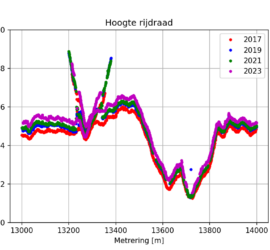
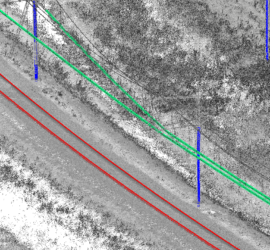
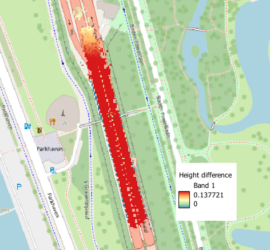
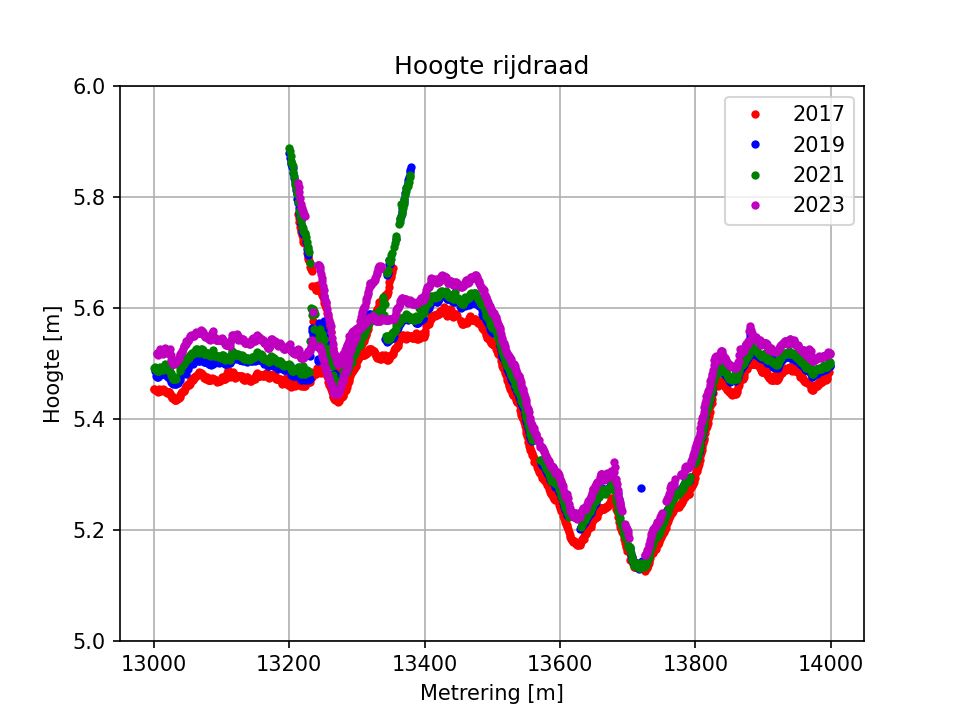
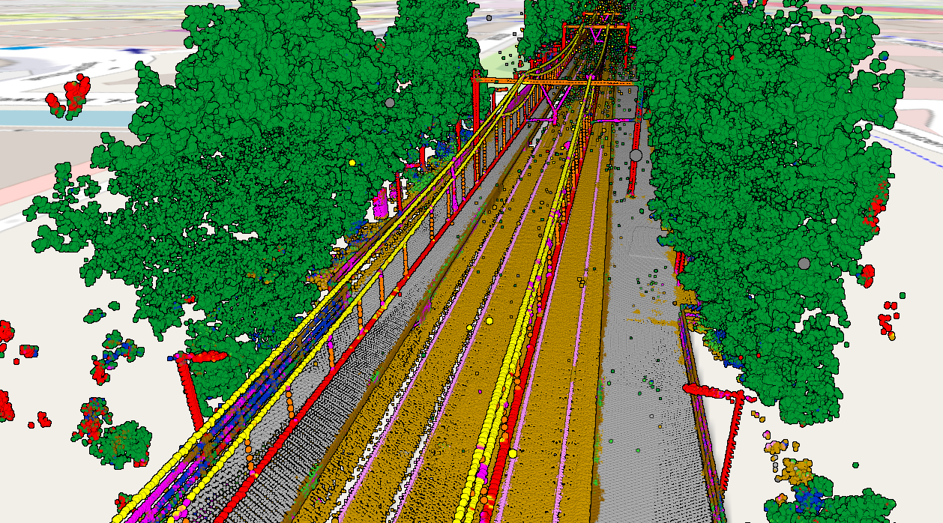
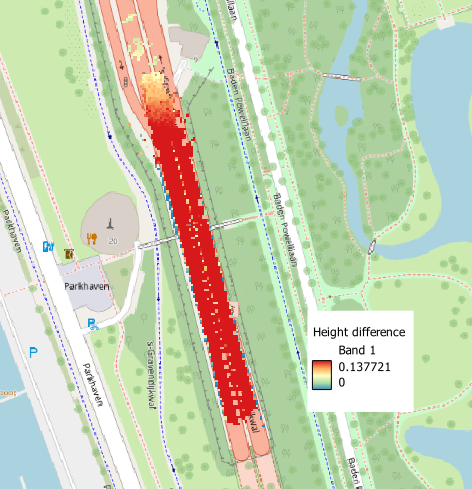
I recently got the request to determine contact wire heights from multiple years of point clouds with the goal of doing a trend analysis. Point clouds acquired in four years were available, all of them acquired […]
Modern Mobile Mapping systems make it very easy to quickly map large areas. Current laser scanners with pulse rates of 1 MHz and above make it possible to achieve sufficient point density even at highway driving […]
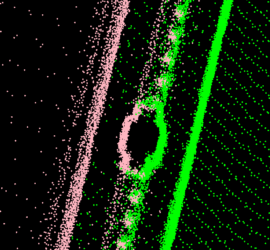
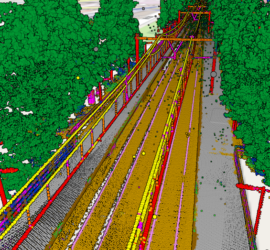
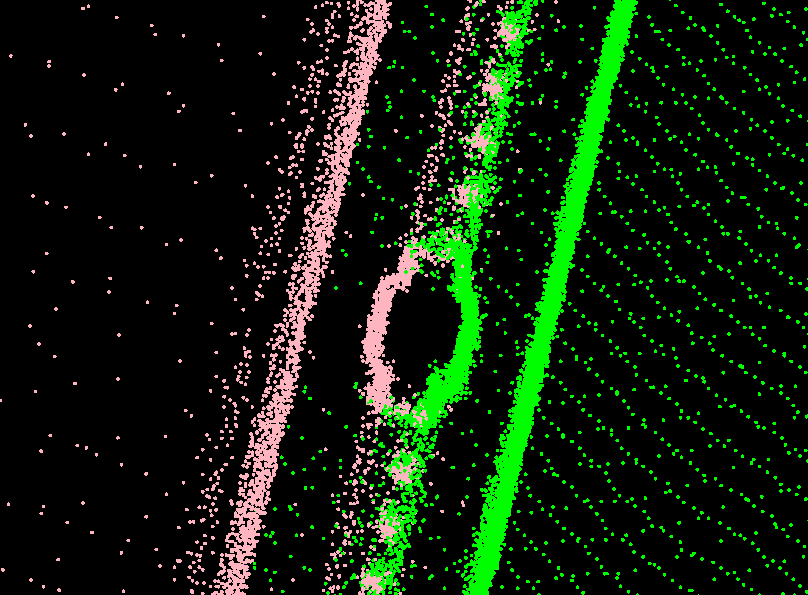
Point clouds acquired through laser scanning with mobile mapping systems mounted on rail vehicles have become the de-facto standard for efficient large-scale mapping of rail infrastructure. Unfortunately, point clouds are large and unstructured heaps of data […]
Okay, let’s be honest: Despite what the manufacturers of laser scanning equipment are trying to tell us, nobody really wants point clouds. They are huge blobs of unstructured and often noisy data with a low semantic […]
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
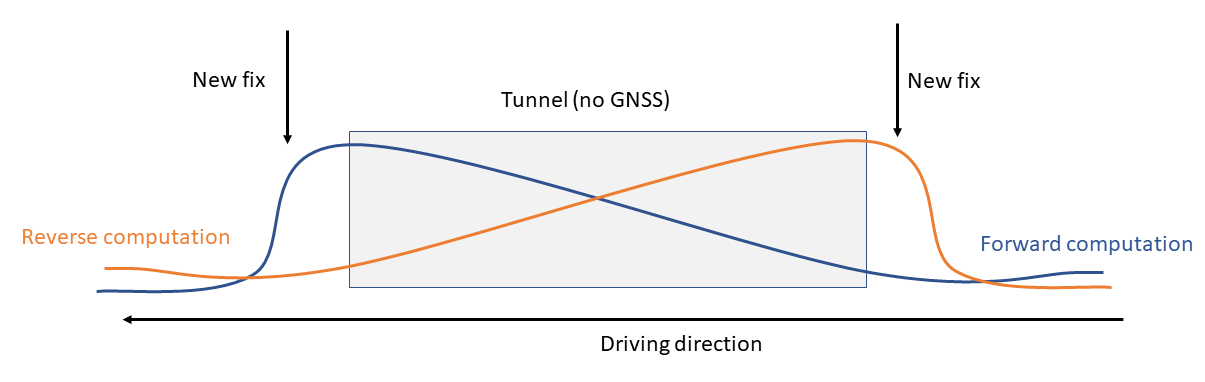
I have many years of experience with Mobile Mapping and created various related software packages. Trajectory analysis Processing Mobile Mapping data starts with computing a good trajectory. I’ve written TTools to analyse trajectories in Inertial Explorer […]
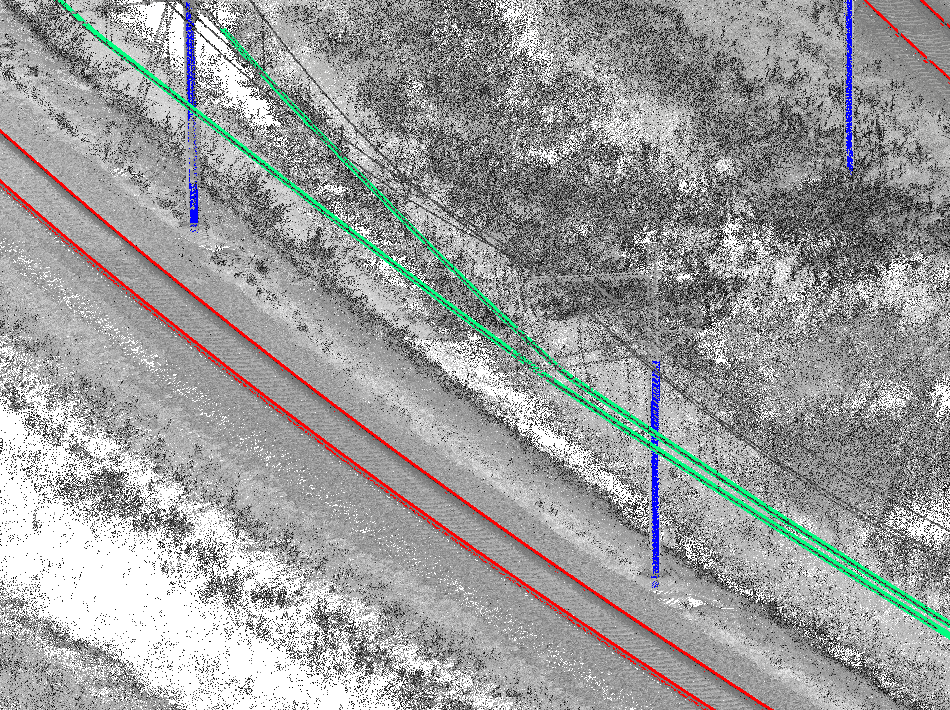
Laser scanning produces huge amounts of data. The challenge is to extract meaningful information from these point clouds in an efficient manner. The first step is classifying the point clouds. There are different approaches to automatic […]